6月16日工信部公示《智能网联汽车 自动驾驶系统安全要求》报批稿,拟2027年7月1日实施
一、谣言澄清:纯视觉方案没有”天塌”
部分博主解读称”L3必须摄像头+毫米波双冗余””L4必须加激光雷达”。
小鹏汽车副总裁于涛 6月19日公开回怼:
文件全文没出现”激光雷达””毫米波雷达””必须双感知冗余”任一说法。
这是结果导向的标准——规定了安全水平(能可靠探测、能应对性能衰退、能执行动态驾驶任务),但”怎么做到”留给企业自己研发。
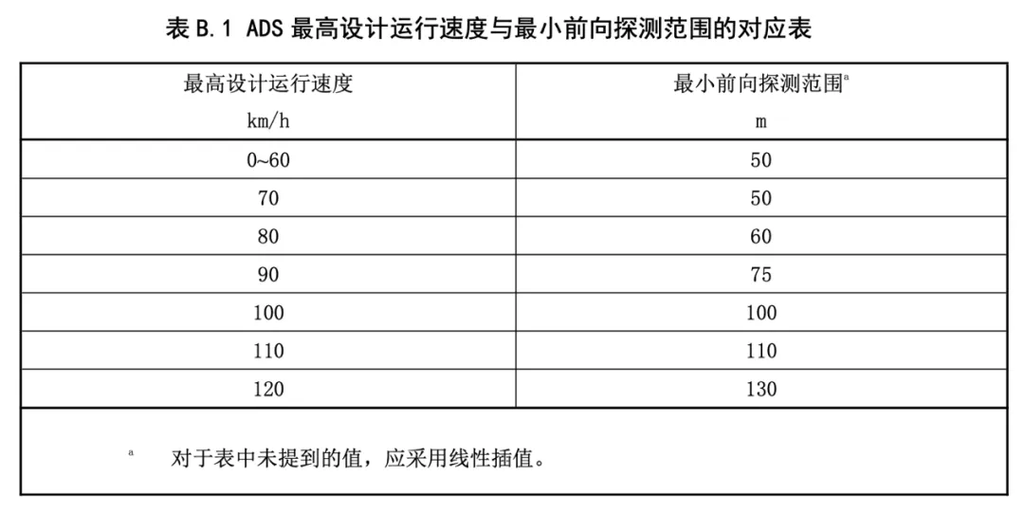
报批稿全文没出现“激光雷达”“毫米波雷达”“必须双感知冗余”任一说法,只对感知能力设了量化指标:感知横向覆盖车身左右各9米、按最高车速匹配前向最小探测距离、要求具备感知性能衰退补偿机制The
✅ 纯视觉方案没有被迫出局,监管不替行业选技术路线。
二、自动驾驶国标体系:三层架构
| 层级 | 标准 | 核心内容 |
|---|---|---|
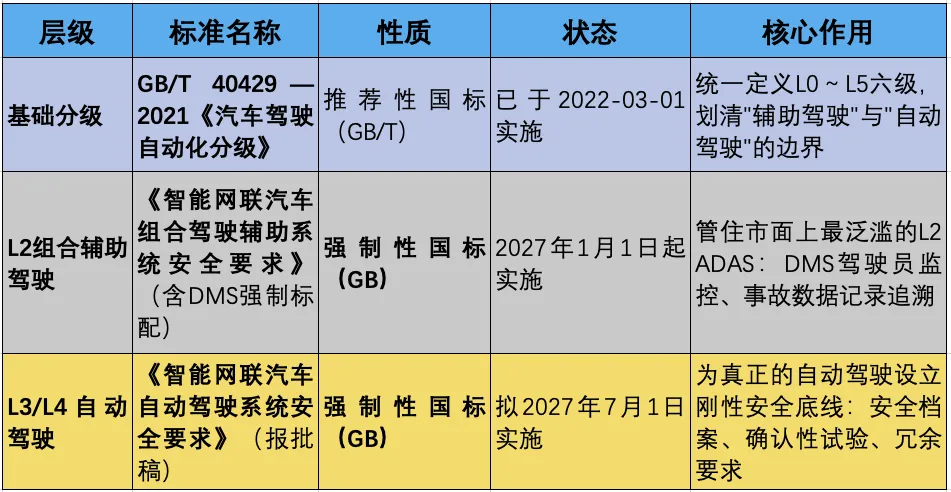
| 第一层 🏗 | GB/T 40429—2021(分级) | 驾驶自动化6级分类,L3是责任分水岭 |
| 第二层 🛡 | L2辅助驾驶强制国标(2027.1.1实施) | DMS驾驶员监控成法定标配 + 事故数据记录强制可追溯,堵住”L2+张口就来” |
| 第三层 🚀 | 《自动驾驶系统安全要求》(报批稿,拟2027.7.1实施) | 针对L3/L4的首部强制性国标 |
这个分级国标把驾驶自动化分为6级:
一句话理解:L2和L3之间隔着的不只是传感器数量,而是法律责任的分水岭——过了L3这条线,系统自己开车时出的事,不再默认是“你没管好方向盘”,而是车企要为之兜底。
三、L3/L4新国标重点条款
感知要求:
- 横向覆盖车身左右各 9米
- 按最高车速匹配前向最小探测距离
- 要求具备感知性能衰退补偿机制
其他要求:
- 系统激活/退出的安全条件
- 最小风险 maneuver(MRM)要求
- 功能安全 + 预期功能安全 + 网络安全一体化
- Safety Case 论证体系
实施节奏:
- 新车型:实施日起执行
- 已获批车型:约 13个月 缓冲期
新国标具体管什么?举几个条款的例子:
四、首批获准入的案例(证明两种路线都可过关)
| 维度 | 奔驰 S级 L3 | 极狐阿尔法S L3 |
|---|---|---|
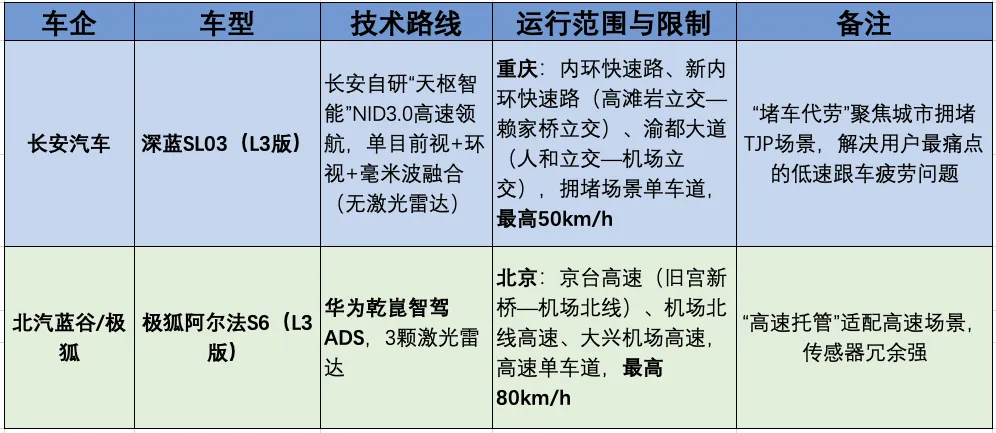
| 技术路线 | 纯视觉+毫米波(轻量路线) | 激光雷达拉满(重冗余路线) |
| Results | ✅ 都拿到了工信部L3准入许可 |
🗓️ 首批获批在工信部第401批公告(2025年12月),仅限试点运营
九家联合体试点(2024年四部门公布):
- 在北京、上海、广州等7城开展L3/L4准入与上路通行试点
- 小鹏、理想、特斯拉、小米等当时未在首批名单中
五、核心结论
| 之前卷什么 | 国标之后卷什么 |
|---|---|
| 堆硬件、卷话术 | 证明安全(过性能红线、出Safety Case) |
| “我的安全无事故X亿公里” | “150ms内能把车安全停下来” |
硬件争论是流量,统一标准才是产业。
💡 于涛怼得有理,但更值得想的是:为什么一份”连激光雷达都没提”的结果导向标准,能让全行业这么敏感?——因为太久没有一把公认的尺子了。
总之:硬件争论是流量,统一标准才是产业。国标没判纯视觉”死刑”,它对所有技术路线一视同仁——谁能证明自己安全,谁就能留在牌桌上。2027年7月1日见分晓。